YASKAWA機器人伺服驅(qū)動器的自動調(diào)整方法,調(diào)整伺服系統(tǒng)是一個復雜而迭代的過程。它通常需要調(diào)整多個控制回路,同時,每個控制回路都需要調(diào)整自己的增益(比例、積分和微分)及額外的參數(shù),如加速度和速度前饋增益以及減少振蕩的過濾器。
廣州安川機器人維修:雖然多年來手動調(diào)諧是業(yè)內(nèi)的主要方法,但現(xiàn)在大多數(shù)伺服驅(qū)動器都具有自動調(diào)節(jié)系統(tǒng)的功能。不同于一開始自動調(diào)諧功能僅在負載剛性耦合并且系統(tǒng)動力學相對簡單的時候才有用,隨著復雜算法的出現(xiàn)和計算機能力的提升,如今機器自帶的自動調(diào)諧功能即使在沒有人手動操作的情況下也能自主解決大部分復雜問題。
安川驅(qū)動器維修,自動調(diào)諧和手動調(diào)諧工作原理相同——通過給定的命令來評估電機的性能,安川YASKAWA機器人伺服驅(qū)動器會自動調(diào)整增益,直到發(fā)現(xiàn)獲得最佳性能的值為止。在大多數(shù)情況下,自動調(diào)諧過程還可以向控制環(huán)路添加濾波器,以抑制由系統(tǒng)中的共振頻率引起的振蕩。
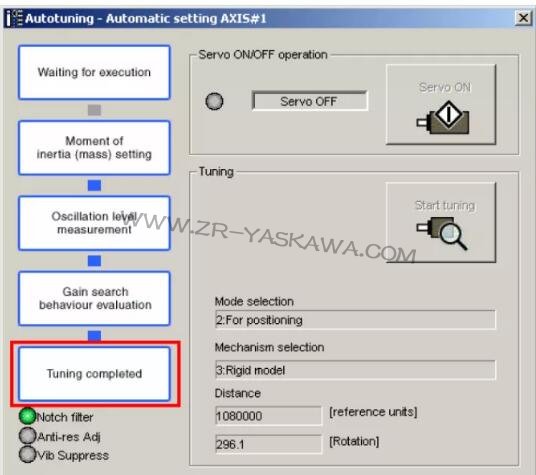
由于電機和負載在該安川伺服驅(qū)動器的自整定過程中被驅(qū)動,驅(qū)動器自動確定系統(tǒng)的慣性、測量振蕩,并設置、評估和優(yōu)化控制回路增益。
安川驅(qū)動器維修自適應調(diào)諧類似于自動調(diào)諧,但它允許的參數(shù)范圍更廣,會提供對伺服系統(tǒng)的穩(wěn)定控制。自適應調(diào)諧會持續(xù)監(jiān)控系統(tǒng)的性能,并在必要時調(diào)整控制回路增益和濾波器參數(shù),以補償系統(tǒng)運行期間未知或變化的負載狀況。自適應調(diào)諧的關(guān)鍵是它在控制系統(tǒng)的背景下連續(xù)運行,通過分析轉(zhuǎn)矩回路的頻率響應來檢測諧振。
安川YASKAWA機器人驅(qū)動器,一個參數(shù)調(diào)整通常是指一種調(diào)諧功能,可以在配置自適應調(diào)諧后用于“微調(diào)”系統(tǒng)的響應。術(shù)語“一個參數(shù)”調(diào)整來自于使用單個參數(shù)來配置多個系統(tǒng)屬性,包括增益、濾波器、摩擦補償和共振控制。這提高了系統(tǒng)的響應性、穩(wěn)定性、過沖和整體效率。