基于OpenCV2.4.8和 python 2.7實(shí)現(xiàn)簡(jiǎn)單的手勢(shì)識(shí)別。
以下為基本步驟
1.去除背景,提取手的輪廓
2. RGB->YUV,同時(shí)計(jì)算直方圖
3.進(jìn)行形態(tài)學(xué)濾波,提取感興趣的區(qū)域
4.找到二值化的圖像輪廓
5.找到最大的手型輪廓
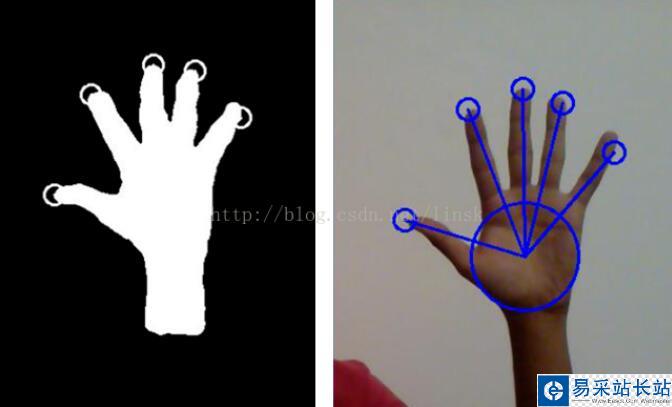
6.找到手型輪廓的凸包
7.標(biāo)記手指和手掌
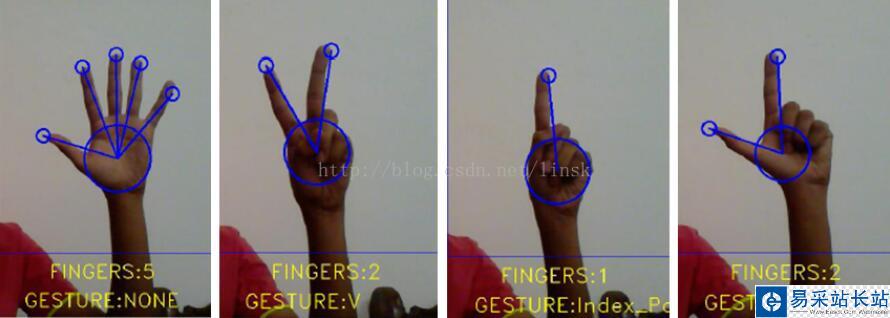
8.把提取的特征點(diǎn)和手勢(shì)字典中的進(jìn)行比對(duì),然后判斷手勢(shì)和形狀
提取手的輪廓 cv2.findContours()

找到最大凸包c(diǎn)v2.convexHull(),然后找到手掌和手指的相對(duì)位置,定位手型的輪廓和關(guān)鍵點(diǎn),包括手掌的中心,手指的相對(duì)位置
特征字典主要包括以下幾個(gè)方面:名字,手掌中心點(diǎn),手掌的直徑,手指的坐標(biāo)點(diǎn),手指的個(gè)數(shù),每個(gè)手指之間的角度
例如:
# BEGIN ------------------------------------#V=gesture("V")V.set_palm((475,225),45)V.set_finger_pos([(490,90),(415,105)])V.calc_angles()dict[V.getname()]=V# END --------------------------------------#最終的識(shí)別結(jié)果如下:
示例代碼
frame=hand_threshold(fg_frame,hand_histogram) contour_frame=np.copy(frame) contours,hierarchy=cv2.findContours(contour_frame,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) found,hand_contour=hand_contour_find(contours) if(found): hand_convex_hull=cv2.convexHull(hand_contour) frame,hand_center,hand_radius,hand_size_score=mark_hand_center(frame_original,hand_contour) if(hand_size_score): frame,finger,palm=mark_fingers(frame,hand_convex_hull,hand_center,hand_radius) frame,gesture_found=find_gesture(frame,finger,palm) else: frame=frame_original
以上這篇OpenCV+python手勢(shì)識(shí)別框架和實(shí)例講解就是小編分享給大家的全部?jī)?nèi)容了,希望能給大家一個(gè)參考,也希望大家多多支持武林站長(zhǎng)站。
新聞熱點(diǎn)





疑難解答
圖片精選
網(wǎng)友關(guān)注